PPT: Pre-Training with Pseudo-Labeled Trajectories for Motion Forecasting
Yihong Xu Yuan Yin Tuan-Hung Vu Alexandre Boulch Éloi Zablocki Matthieu Cord
International Conference on Robotics & Automation (ICRA), 2026
and CoRL Robot Data Workshop 2025
Abstract
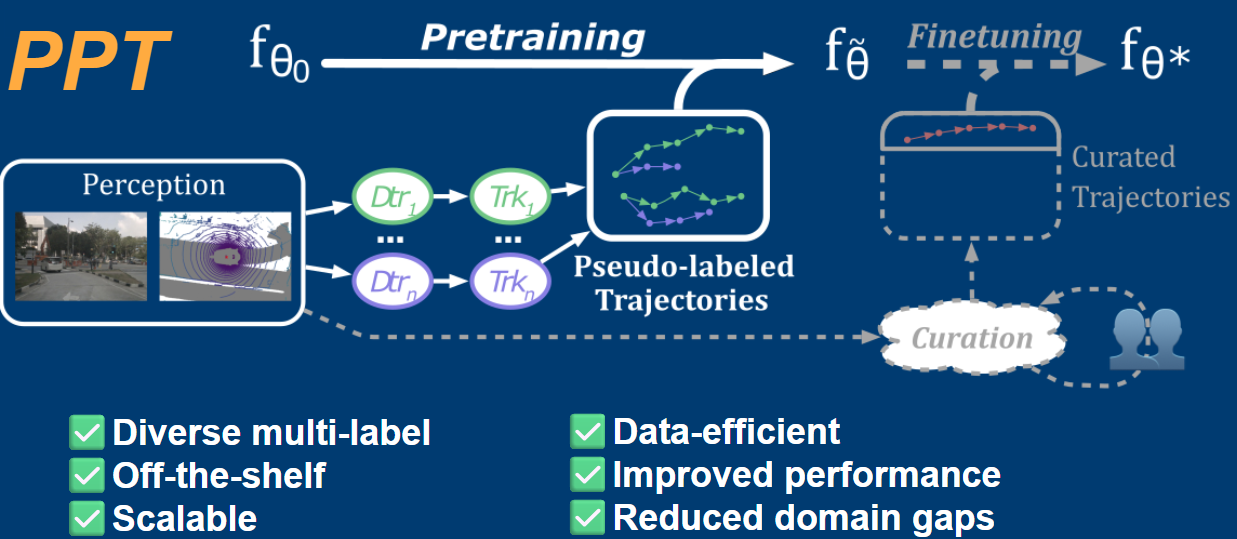
Motion forecasting (MF) for autonomous driving aims at anticipating trajectories of surrounding agents in complex urban scenarios. In this work, we investigate a mixed strategy in MF training that first pre-train motion forecasters on pseudo-labeled data, then fine-tune them on annotated data. To obtain pseudo-labeled trajectories, we propose a simple pipeline that leverages off-the-shelf single-frame 3D object detectors and non-learning trackers. The whole pre-training strategy including pseudo-labeling is coined as PPT. Our extensive experiments demonstrate that: (1) combining PPT with supervised fine-tuning on annotated data achieves superior performance on diverse testbeds, especially under annotation-efficient regimes, (2) scaling up to multiple datasets improves the previous state-of-the-art and (3) PPT helps enhance cross-dataset generalization. Our findings showcase PPT as a promising pre-training solution for robust motion forecasting in diverse autonomous driving contexts.